 ESPCI web site
ESPCI web site
Modelling of an actuated elastic swimmer
M. Piñeirua, B. Thiria & R. Godoy-Diana
Journal of Fluid Mechanics 829 731-750 (2017)
[doi:10.1017/jfm.2017.570]
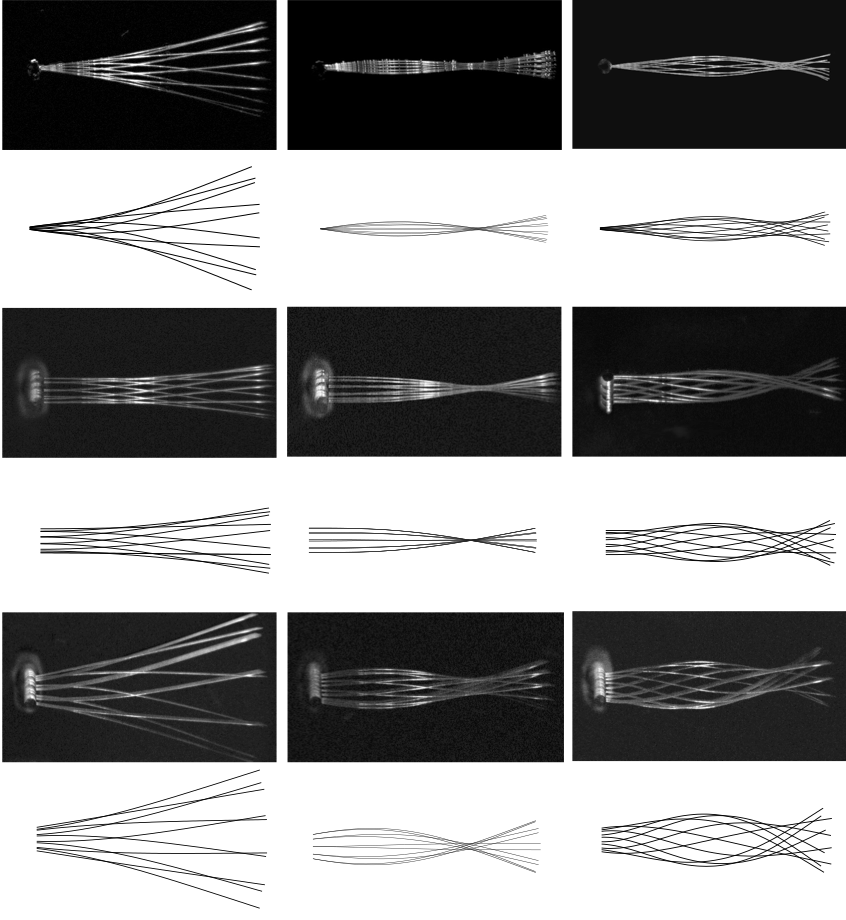
We studied the force production dynamics of undulating elastic plates as a model for fish-like inertial swimmers. Using a beam model coupled with Lighthill’s large-amplitude elongated-body theory, we explore different localised actuations at one extremity of the plate (heaving, pitching and a combination of both) in order to quantify the reactive and resistive contributions to the thrust. The latter has the form of a quadratic drag in large Reynolds number swimmers and has recently been pointed out as a crucial element in the thrust force balance. We validate the output of a weakly nonlinear solution to the fluid–structure model using thrust force measurements from an experiment with flexible plates subjected to the three different actuation types. The model is subsequently used in a self-propelled configuration – with a skin friction model that balances thrust to produce a constant cruising speed – to map the reactive versus resistive thrust production in a parameter space defined by the aspect ratio and the actuation frequency. We show that this balance is modified as the frequency of excitation changes and the response of the elastic plate shifts between different resonant modes, the pure heaving case being the most sensitive to the modal response with drastic changes in the reactive/resistive contribution ratio along the frequency axis. We analyse also the role of the phase lag between the heaving and pitching components in the case of combined actuation, showing in particular a non-trivial effect on the propulsive efficiency.