ESPCI web site
ESPCI web site
B. Lafoux, J. Moscatelli, R. Godoy-Diana & B. Thiria
Communications Biology 6, Article number: 585 (2023)
doi: 10.1038/s42003-023-04861-8
We experimentally investigate the role of illumination on the collective dynamics of a large school (ca. 50 individuals) of Hemigrammus rhodostomus.
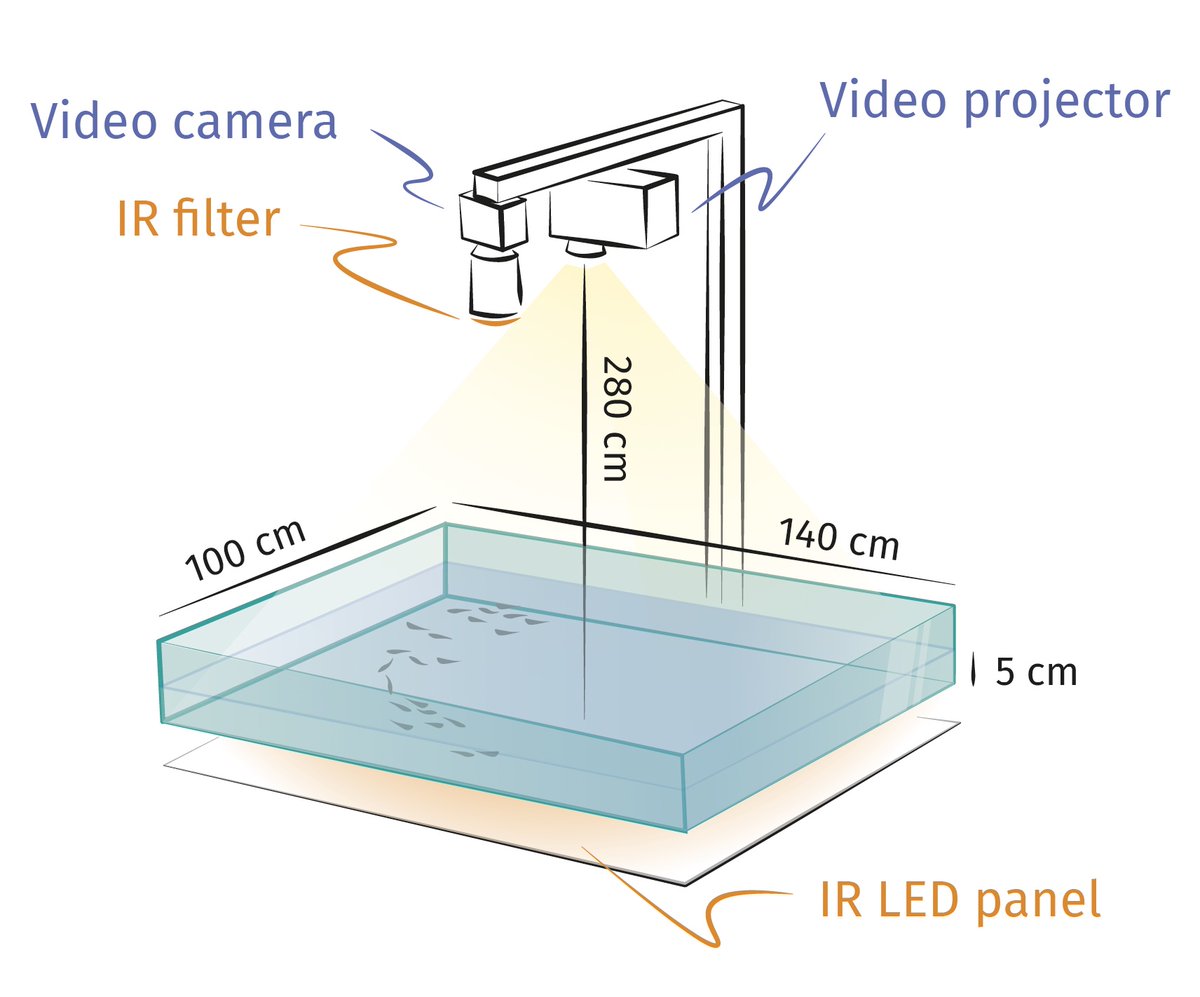
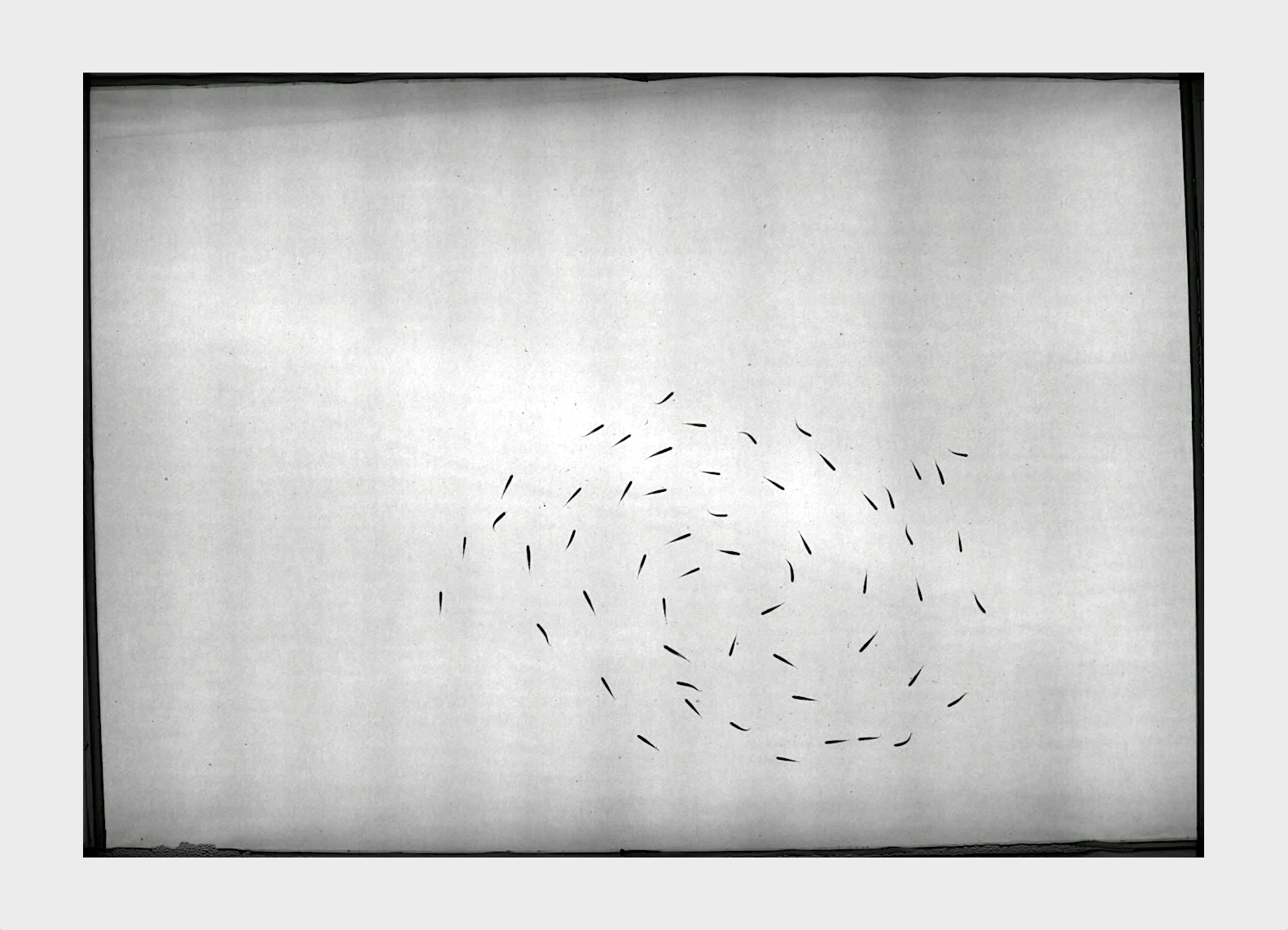
The structure of the group, defined using two order parameters (milling annd polarization), is quantified while progressively altering the visual range of the fish through controlled cycles of ambient light intensity. We show that, at low light levels, the individuals within the group are unable to form a cohesive group…
while at higher illuminance the degree of alignment of the school correlates with the light intensity. When increasing the illuminance, the school structure is successively characterized by a polarized state…
followed by a highly regular and stable rotational configuration (milling).
Our study shows that vision is necessary to achieve cohesive collective motion for free swimming fish schools, while the short-range lateral line sensing is insufficient in this situation. The present experiment therefore provides new insights into the interaction mechanisms that govern the emergence and intensity of collective motion in biological systems. Watch a full experiment here:
Full paper here:
Lafoux, B., Moscatelli, J., Godoy-Diana, R., Thiria, B. Illuminance-tuned collective motion in fish. Commun Biol 6, 585 (2023).
https://doi.org/10.1038/s42003-023-04861-8