ESPCI web site
ESPCI web site
P. Yu, R. Godoy-Diana, B. Thiria, D. Kolomenskiy, T. Engels
Journal of the Royal Society Interface 23: 20250659 (2026).
doi: 10.1098/rsif.2025.0659
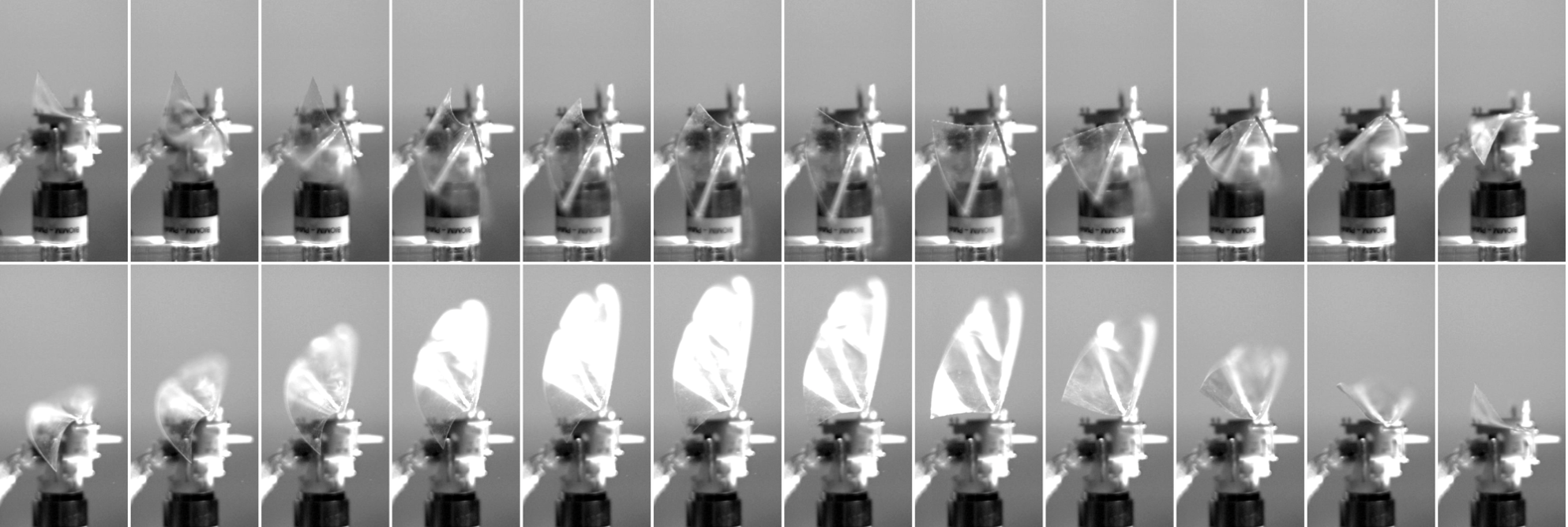
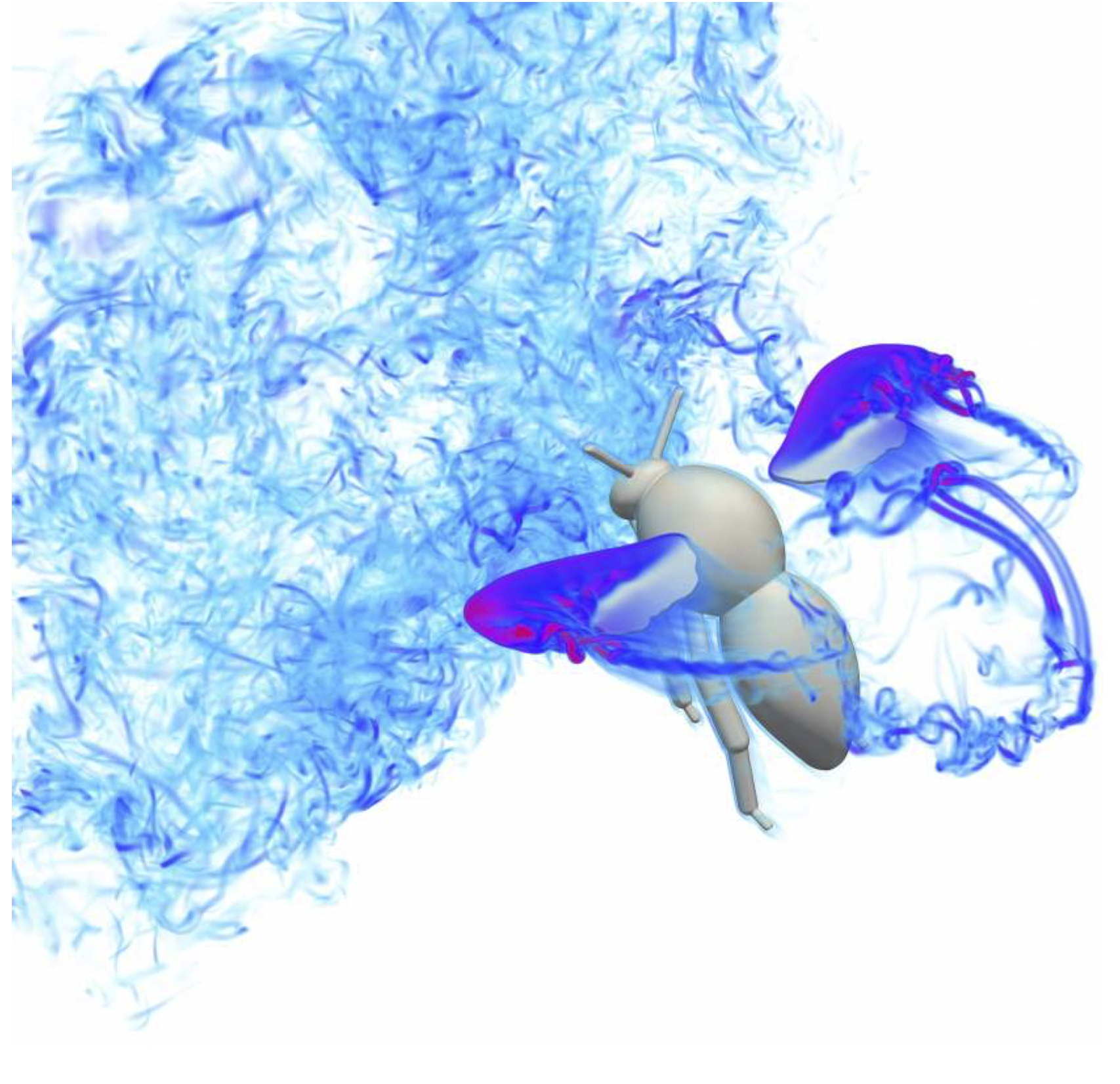
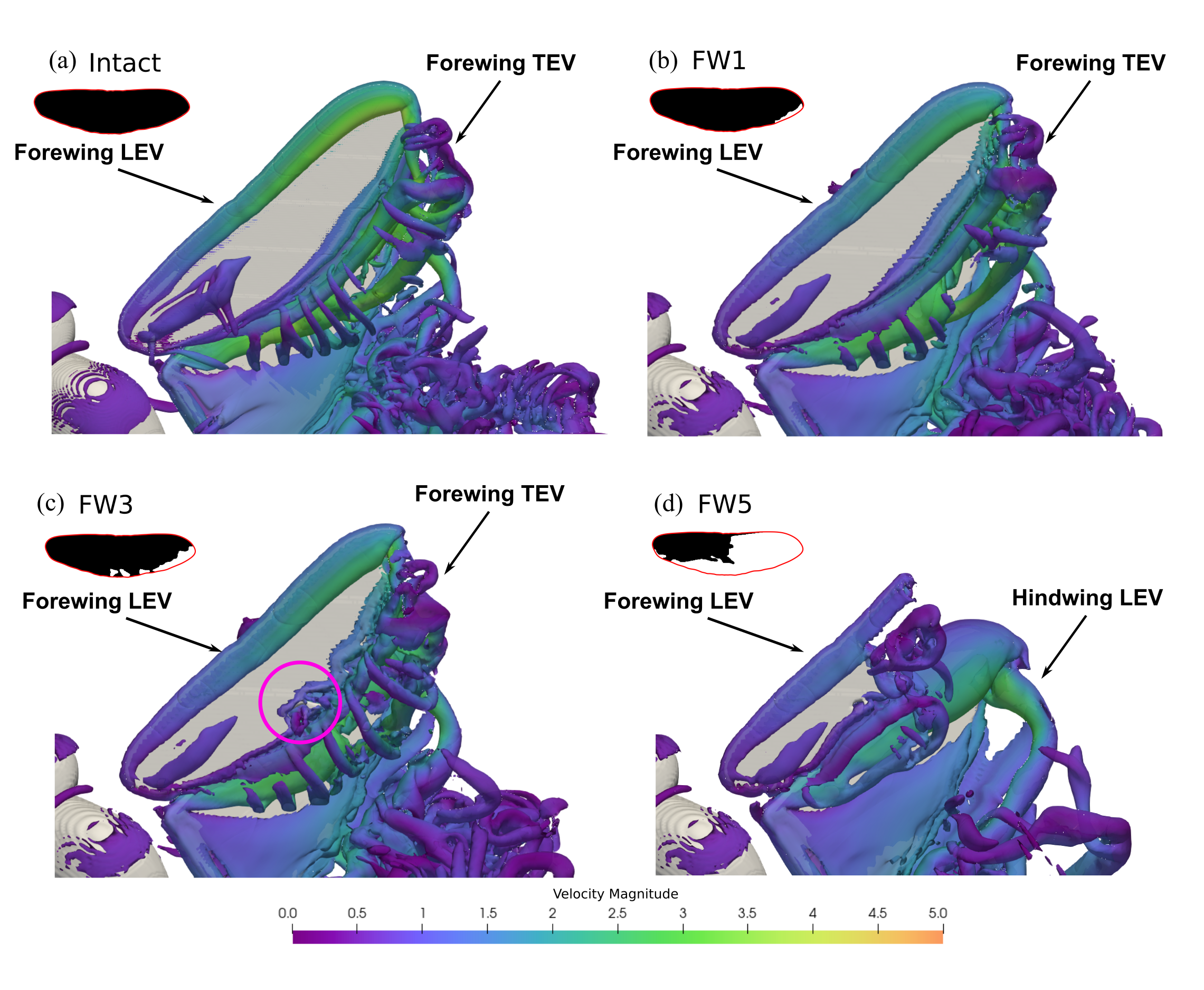
Flapping wings are the primary means by which dragonflies generate forces, but they are susceptible to damage due to their inherent fragility. The damage results in a reduction in wing area and a distortion of the original wing, which in turn leads to a decline in flight ability. Furthermore, the flows of dragonfly forewings and hindwings exhibit an interaction; thus, damage to the forewing can also impact the aerodynamic performance of the ipsilateral hindwing. In this study, we examine this problem through computational fluid dynamics simulations on a series of damaged dragonfly forewing/hindwing models according to the probability of area loss from the literature. The flow fields and aerodynamic forces for the different damaged wing cases are compared with those for the intact wings. This comparative analysis reveals how the different patterns of wing damage modify the vortex structures around the flapping wings and lead to a drop in aerodynamic force production. The causes behind the diminishing aerodynamic performance are shown to be subtler than the pure area loss and are regulated by the changes in the flow field that result from wing damage. Wing–wing interaction becomes particularly important when forewing damage occurs.