 ESPCI web site
ESPCI web site

Baromorph : bio-inspired pneumatic shape-morphing
Emmanuel Siéfert, Etienne Reyssat, José Bico, Benoît Roman
See our article on the cover of Nature Materials and the comments News and Views by Effi Efrati.
 We present a new architetured material, bio-inspired pneumatic shape-morphing elastomers, that can morph into any target 3D shape upon activation. Inspired by the morphogenesis of living organs, a specific network of airways is embedded into an elastomeric plate: pressure inside the channels triggers a targeted distributed in-plane expansion, here the equivalent of biological growth, that is incompatible with the reference flat configuration. The plate thus freely buckles out of plane to morph onto the target shape.
We present a new architetured material, bio-inspired pneumatic shape-morphing elastomers, that can morph into any target 3D shape upon activation. Inspired by the morphogenesis of living organs, a specific network of airways is embedded into an elastomeric plate: pressure inside the channels triggers a targeted distributed in-plane expansion, here the equivalent of biological growth, that is incompatible with the reference flat configuration. The plate thus freely buckles out of plane to morph onto the target shape.
Pneumatic soft robotics actuators are believed to overcome in the future some important current robots limitations, such as gentle manipulation of delicate objects, moving and working in chaotic environments. Many pneumatic soft actuators have been developed the last few years for applications in mini-invasive surgery, rehabilitation, collaborative robots or deep-marine exploration.
However, they are intrinsically limited to one-directional bending, twisting or expansion, and surface texturing effects. Our baromorphs are in contrast capable of morphing into a wide familiy of shape.
From a practical point of view, these novel structures:
– are easy to build, from any elastomer, and can be easily reproduced by a large community of researchers and engineers,
– are versatile in terms of shapes that can be programmed, and a geometrically exact inverse recipe is proposed in this article.
– can be actuated dynamically, and sustain as high a mechanical load as conventional pneumatic soft-robotics devices
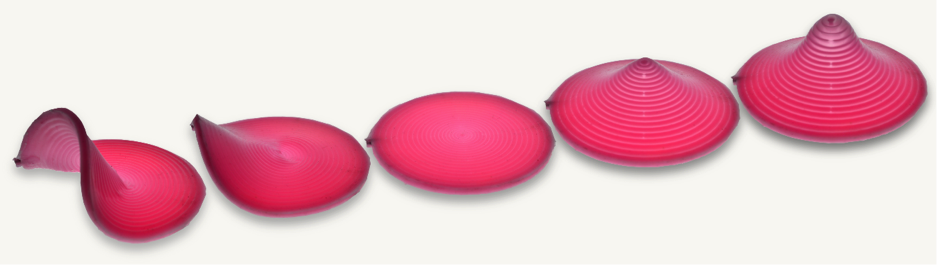
The mapmaker problem : how to morph a plane into a sphere
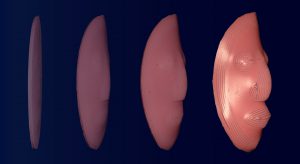
A baromorph programmed for a saddle shape :
A baromorph programmed for a mask:
Baromorphs change shape fast: (real time video)
How to make one? Here is a Tutorial video: