 ESPCI web site
ESPCI web site
Principe
Le principe de base de l’électro-magnéto-hydro-dynamique est relativement simple à comprendre. Les composantes principales en sont les suivantes:
1-Un fluide comportant des particules chargées
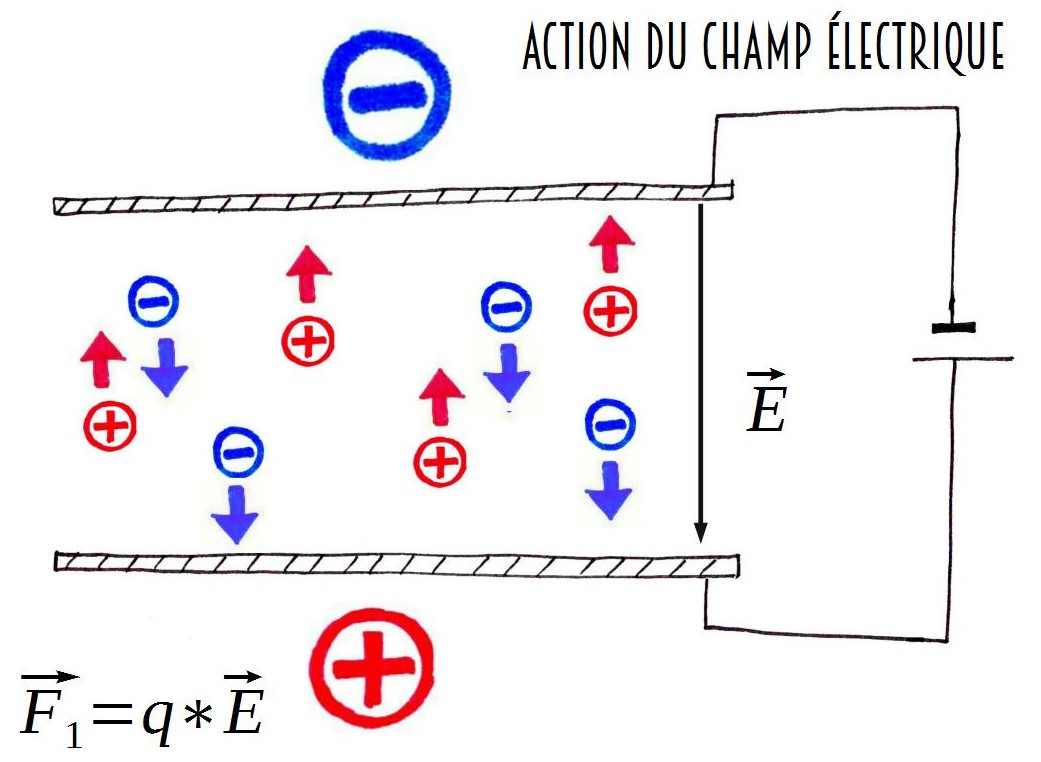
2-Un champ électrique
3-Un champ magnétique
L’idée est que l’on va avoir un mouvement des particules selon leur charges par l’action du champ électrique. L’action du champ magnétique va quand à elle dévier les particules en mouvement de manière à les envoyer toutes dans la même direction, on a alors un phénomène de propulsion qui se met en place.


Méthodes et protocole
Pour les expériences réalisées on a utilisé de l’eau salée comme liquide porteur d’ions, des aimants aux néodymes pour créer le champ magnétique et des électrodes de cuivre couplées à un générateur pour le champ électrique.
Dans un premier temps on a conçu une tuyère fermée couplé à un montage qui nous permet de mesurer quantitativement et précisément la force fournie par la tuyère:

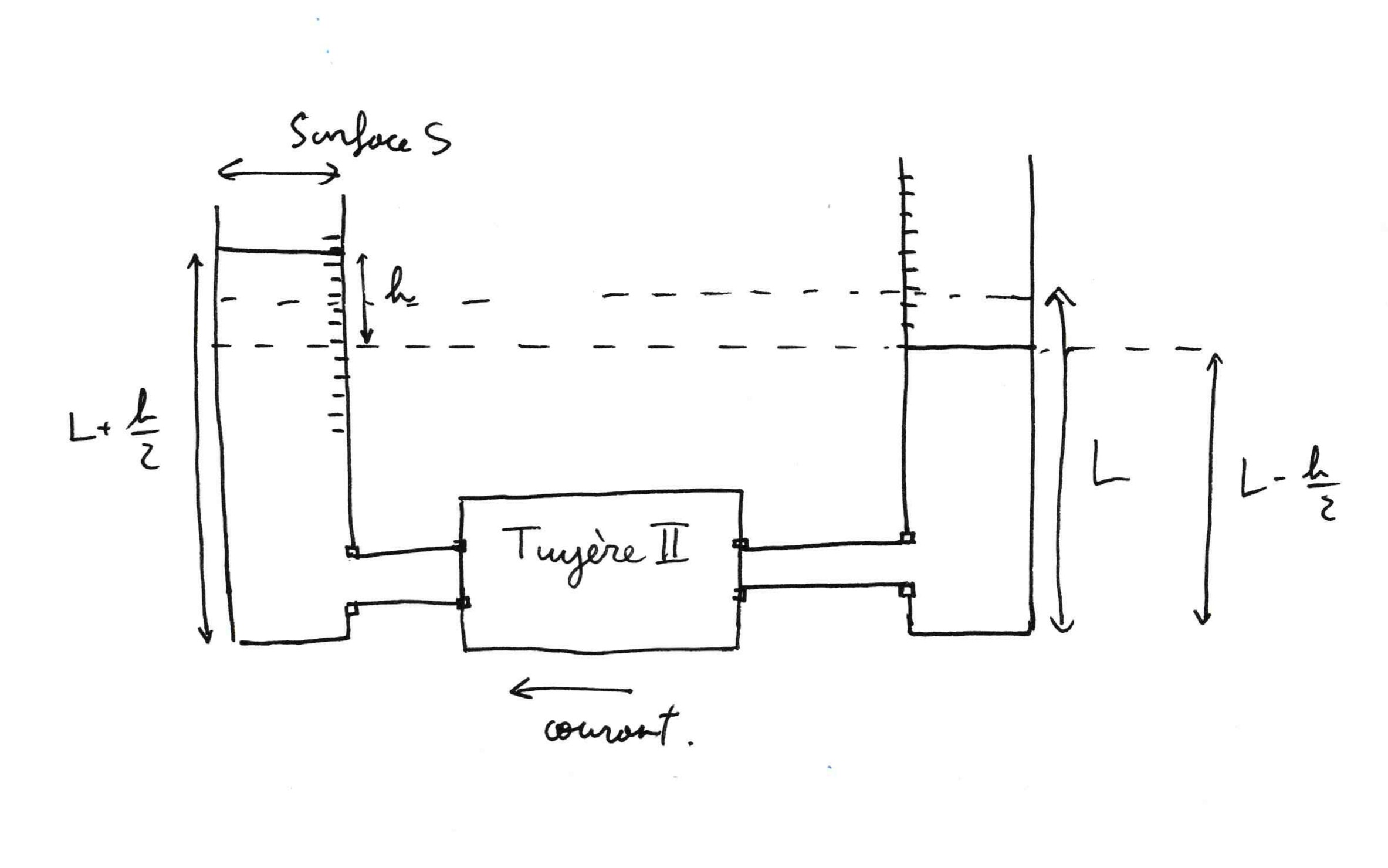
Cependant cette expérience nous a avant tout montré que les effets d’électrolyse observés sur les électrodes de cuivres s’accompagnaient d’un dégagement gazeux qui, dans le cadre d’un milieu fermé, rend impossible la prise d’une mesure correcte, on a donc légèrement modifié le montage pour localisé le dégagement gazeux sur seulement l’une des deux branches:

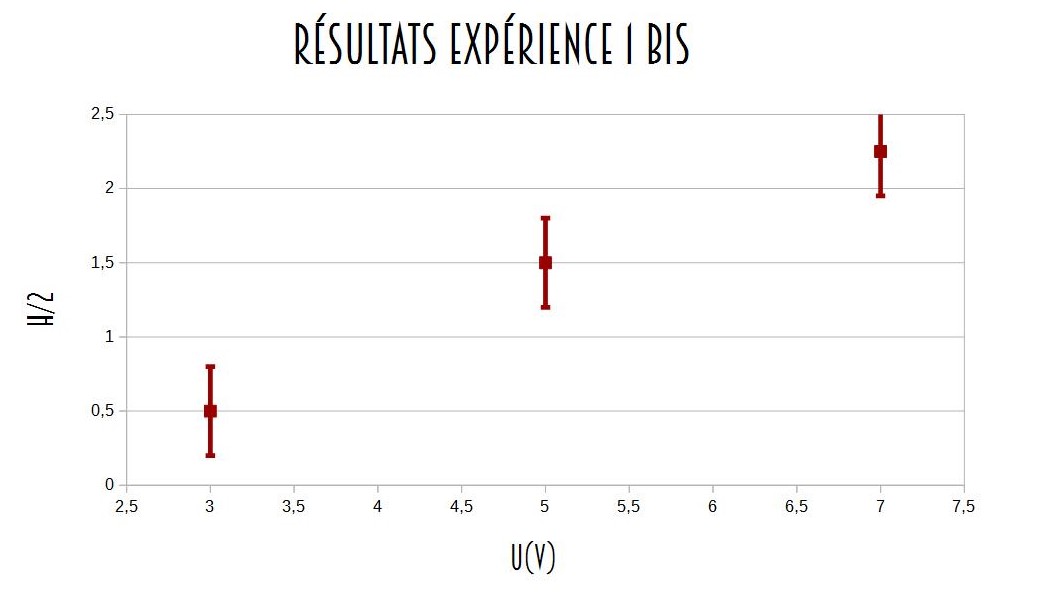
Ceci nous a permis de mettre en lumière une première dépendance de la force (hauteur du fluide) par rapport à la tension fournie.
Expériences
Nous avons suivi une démarche progressive. En effet, trois séries de mesures ont
été menées, ayant nécessité chacune plusieurs bancs d’essais. Le premier non
quantitatif servait à confirmer le principe étudié, les suivants pensés pour
assurer une mesure reproductible s’amélioraient progressivement en fonction des
problèmes rencontrés sur les versions antérieures.
Notre but final était de trouver le point de fonctionnement optimum d’un système
EMHD simple constituant une tuyère. Un modèle de connaissance du montage n’était
pas envisageable, nous avons donc décidé de développer un modèle statistique appris
sur des données expérimentales d’un côté et un modèle simulé par la méthode des
éléments finis que nous souhaitions comparer à la fin de notre étude. Deux
stratégies nous ont d’abord intéressés, une basée sur l’effet Hall simple dans un
liquide, l’autre étant une variante générant un champ E induit en utilisant un
champ B variable. Cette deuxième stratégie s’est vu rapidement abandonnée de par la
faible puissance des champs B créés et la forte dissipation de l’eau de mer.
Nous nous sommes donc focalisés sur un système Electro-Magneto-Statique. Pour les
expériences réalisées on a utilisé de l’eau salée comme liquide porteur d’ions, des
aimants aux néodymes pour créer le champ magnétique et des électrodes de cuivre
couplées à un générateur pour le champ électrique.
Manip 1 :
Dans un premier temps nous avons validé le concept et voulu mesurer les propriétés
d’une tuyère Electro-Magneto-Statique
MK0 : On a pris deux morceaux de métaux inconnus que l’on a mis sous tension au
milieu d’une bobine de type Helmholtz dans une boîte de pétri remplie d’eau salée à
saturation. L’effet a été immédiat et on a ainsi confirmé le fonctionnement de la
manip dans ces conditions.

MK1 : Nous avons reproduit les conditions initiales dans la boîte de Pétri remplie
d’eau salée à saturation. Cette fois nous avons utilisé des aimants néodymes et des
électodes de cuivres de mêmes carcatéristiques (composition et surface). En soudant
les éléctrodes aux cables du générateur nous avons évité les problèmes d’oxydation
des pinces croco et assuré un contact éléctrique optimisé. L’écartement variable
entre les deux éléctrodes se fait par un morceau de polystyrène. On observe bien la
création d’un flux de fluide qui cependant se charge rapidement en oxydes de cuivre
empêchant le suivi par tracking. De plus la désolidarisation entre les éléctrodes
et les aimants empêche la reproductibilité de la manipulation.
En conclusion on pense à un système solidarisé par plexiglass découpé au laser à
l’atelier.
Manip 2 :
Nous avons voulu monter une tuyère fermée avec un système de mesure par différence
de pression aval/amont. Selon les plans suivant nous avons donc monté notre
système.
MK2 : Premier système suivant nos plans. On utilise deux éléctrodes de cuivre
encastrées à l’intérieur de la tuyère, le contact avec le générateur se fait au
niveau d’un trou au milieu des éléctrodes. Ce trou doit être étanchéifié par du
silicone comme toutes les jointure de contact entre deux morceaux de plexiglass.
Deux tubes en amont et aval permettent d’obtenir la différence de pression et ainsi
la force appliquée par tuyère. La mise en marche de la tuyère a entrainé son
explosion (perte de l’étanchéité) par le dégagement de H2 au niveau de l’anode. On
assiste de plus à un dégagement mousseux qui empêche la mesure.
MK3 : On reproduit le dispositif précédent en ajoutant de la pâte conductrice pour
assurer le contact avec le générateur. De plus l’étanchéité est assuré par l’usage
d’une dose nettement supérieure de silicone. La mesure est toujours biaisée par le
dégagement gazeux.
Finalement, la stratégie de tuyère fermée ne semble pas efficiente pour des mesures.
MK4 : On a utilisé une électrode sacrificielle, l’hydrolyse doit être favorisée à
son niveau et elle préserve ainsi les électrodes fonctionnelles de l’attaque. Aucun
résultats positifs n’a été obtenu grâce à cette électrode.
Nous avons à ce moment constaté que nous ne pourrions pas tester différents
écartements à l’aide des montage utilisés, il aurait fallu monter une tuyère pour
chaque écartement (dont l’étanchéité devait être ). Pour étudier ces effets, nous
avons donc réfléchi à un système à géométrie variable.
L’hydrolyse a cependant toujours lieu et par conséquent une partie de la puissance
fournie est perdue par transformation chimique. Il nous est alors apparu évident
que pour optimiser notre systême nous devions isoler les électrodes du liquide.
Manip 3 :
Il s’agissait maintenant de trouver un systême permettant la création du courant
transverse de charges qui permette l’isolement des électrodes de l’eau de mer.
MK5 : On a plastifie à l’aide de scotch deux morceaux de tôles non calibrés mis
dans une boîte de pétri remplie d’eau salée à saturation sous tension au dessus
d’aimants néodymes. On n’observe aucun phénomène. On en déduit que le temps
d’écrantage de nos électrodes est bien inférieur à celui d’évacuation de celles-ci
par effet Hall.
Il faut donc trouver un moyen d’évacuer les charges pour éviter l’écrantage. La
solution à laquelle nous avons pensé est de pratiquer une ouverture dans les
électrodes pour permettre la circulation d’un flux de charges.
MK6 : Nous avons donc plastifié grossièrement au scotch deux tôles de cuivre
plastifiées que nous avons ensuite utilisées dans les mêmes conditions que
précédemment. Nous avons constaté un léger flux qui aurait tendance à encourager
notre stratégie
Il s’agissait maintenant de voir quelles géométries et paramètres de ces nouvelles
électrodes aboutissent à un maximum d’efficacité de notre système.
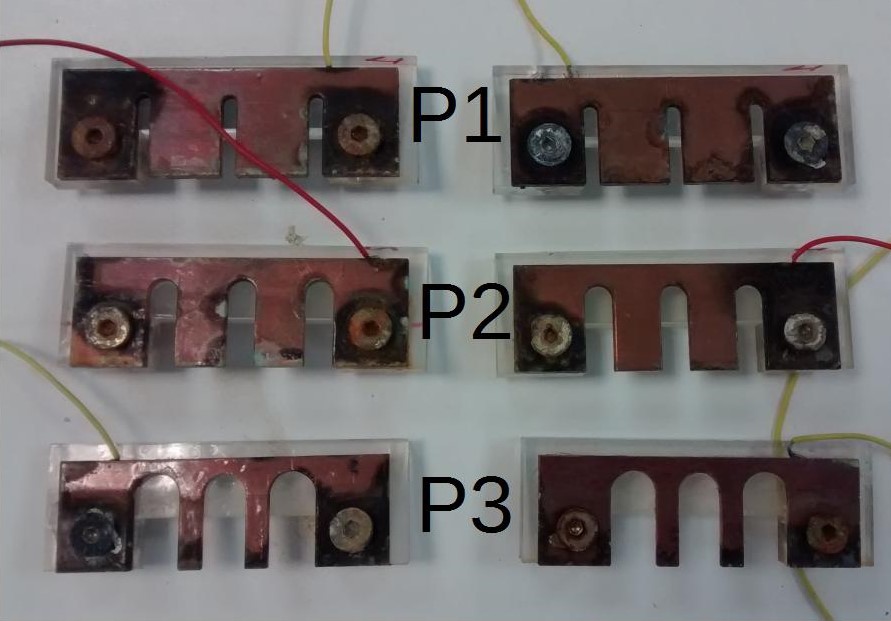
MK7 : Nous avons donc adapter les plans de MK2/MK3 pour y placer des éléctrodes à
rapports cycliques trous/éléctrodes et périodicités spatiales variables.

Ce montage expérimental s’est trouvé être efficace et robuste. Les mesures ont été
extraites à partir de données vidéos analysables que nous avons traitées.
Traitement des données :
Nos expériences, pour celles que nous avons considérées suffisament reproductibles,
ont été prises en vidéo par une caméra et enregistrées par PYLON. Nous avons
ensuite utilisé le module MATLAB PIVlab pour en extraire le champ des vecteurs
vitesse. La présence de poussière dans le sel et les oxydes de cuivre assurent un
bon suivi de la vitesse par PIV (Particular Imagery Velocity). Cependant les oxydes
coulant, la vitesse mesurée n’est pas celle de la totalité du flux. On apperçoit
ainsi plusieurs vitesses pour les particules, on a considéré que le résultat en
était une moyenne. Une fois les données extraites, il nous a alors été possible de
les analyser sous MATLAB pour en extraire les tendances et les données
statistiques.
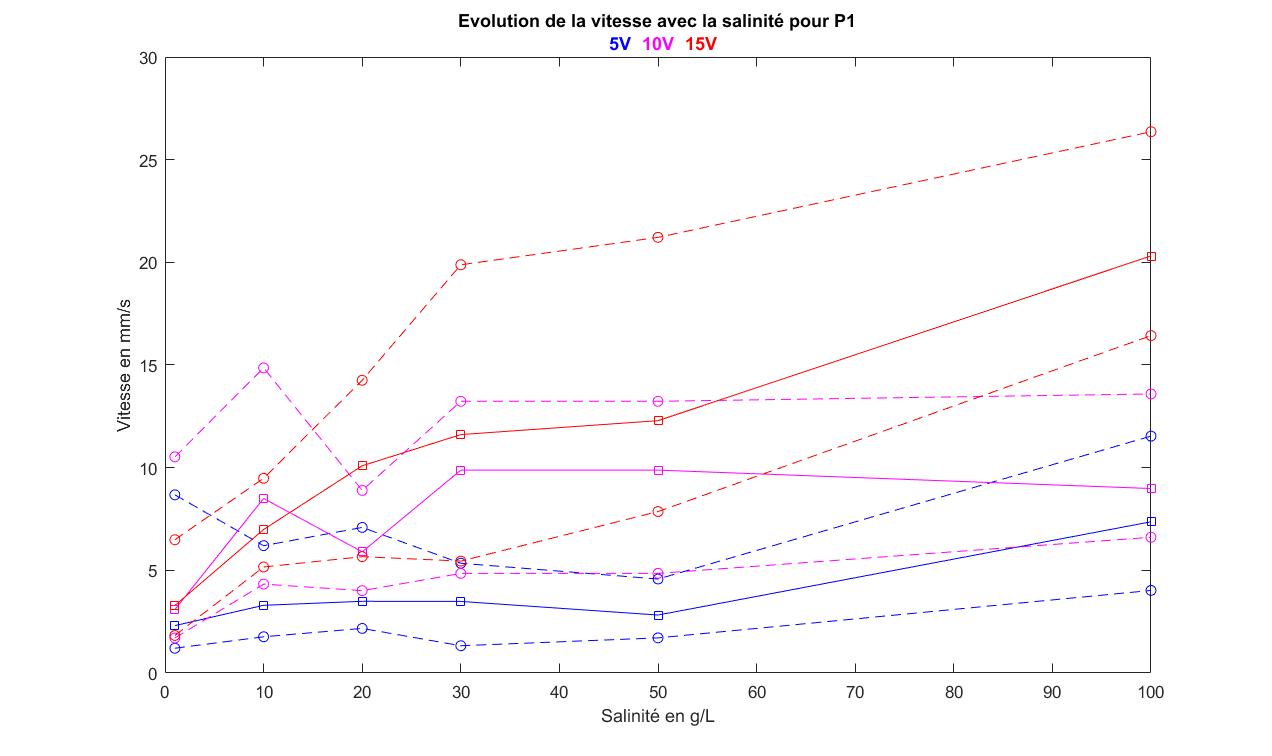
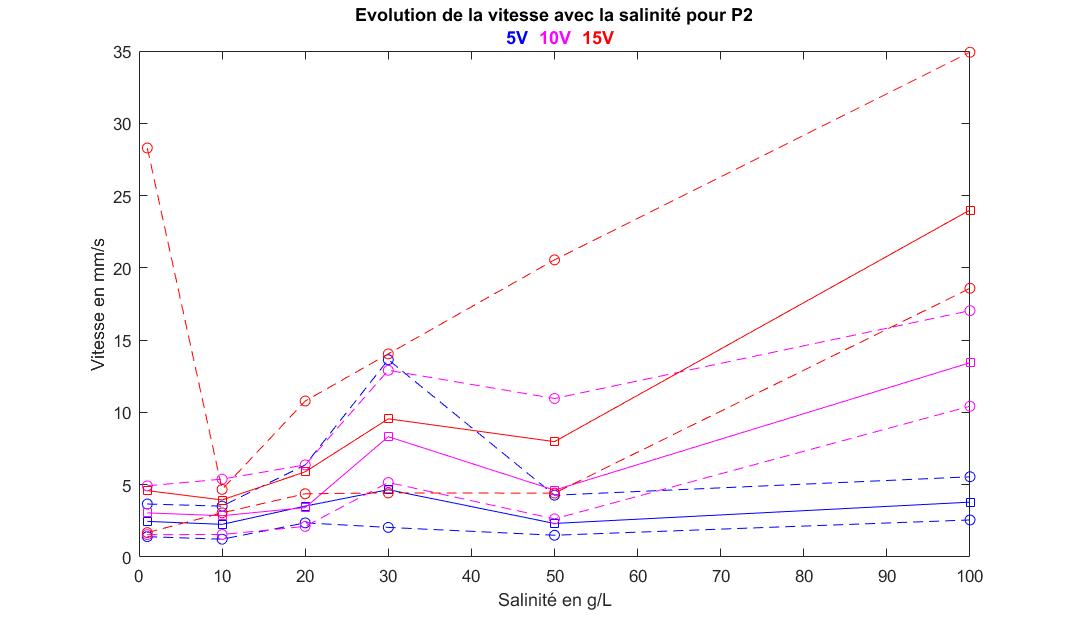
Profil des vitesses en sortie de la tuyère

Conclusion
Notre but était d’optimiser un système Electro-Magnéto-Hydro-Dynamique pour de l’eau de mer. Nous avons commencé par établir un modèle et nos premières expériences nous ont montrées que notre principal problème était l’attaque des électrodes par électrolyse. Après plusieurs essais infructueux (graphite, électrodes sacrificielles), nous avons choisi comme solution de pratiquer des ouvertures dans des électrodes vernissées pour s’affranchir de l’electrolyse en évitant toutefois les problèmes d’écrantage.
Nous voulions alors monter une expérience reproductible qui nous aurait permis d’étudier les 5 paramètres dont nos premières manipulations nous ont montré l’importance.
Nous avons réussi à dresser un protocole assurant la reproductibilité de nos expériences. Cependant une série de mesures prenant 54 vidéos pour un total d’environ 24 heures de traitement ne nous a pas permis l’étude statistique attendu. En parallèle, l’application de la méthode des éléments finis pour simuler notre système n’a pas abouti en raison de notre impossibilité à transcrire la forme de l’excitation dans le langage utilisé.
Finalement notre étude confirme que l’optimisation de tranfert de puissance Electro-Magnéto-Hydro-Dynamique se fait lors de la maximisation du champ électrostatique et de la salinité de l’eau de mer tout en limitant dans la mesure du possible les pertes physico-chimiques.
Ainsi, nous recommandons dans la poursuite de ce projet une étude plus approfondie de l’écrantage des charges dans les électrodes.